The store will not work correctly in the case when cookies are disabled.
Best Modules will be closed from Apr. 3nd to Apr. 6th in observance of Tomb Sweeping Day. Please be informed that any orders placed after 15:00 PM Apr. 1st (Taiwan time, UTC+8) will be processed on Apr. 7th.
We use cookies for optimal website use.We recommend you to allow cookies for a better user experience. Please read our privacy policy. Learn more.
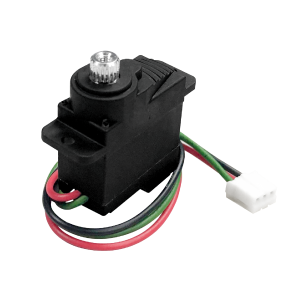
BM22O2121-A is a servo with UART interface which provides 0.075kg-cm torque. It includes a 3-Pin Power / 1-wire bidirectional UART interface. It is suitable for application in remote control cars, remote control planes, remote control models, remote control robots, etc.
Comparing with the PWM servo, the UART servo is able to control a wider angle and has higher accuracy. In addition, UART servo can be connected in series with each other, and users can control them by an external MCU. Please refer to DETAILS for more information.
Product information
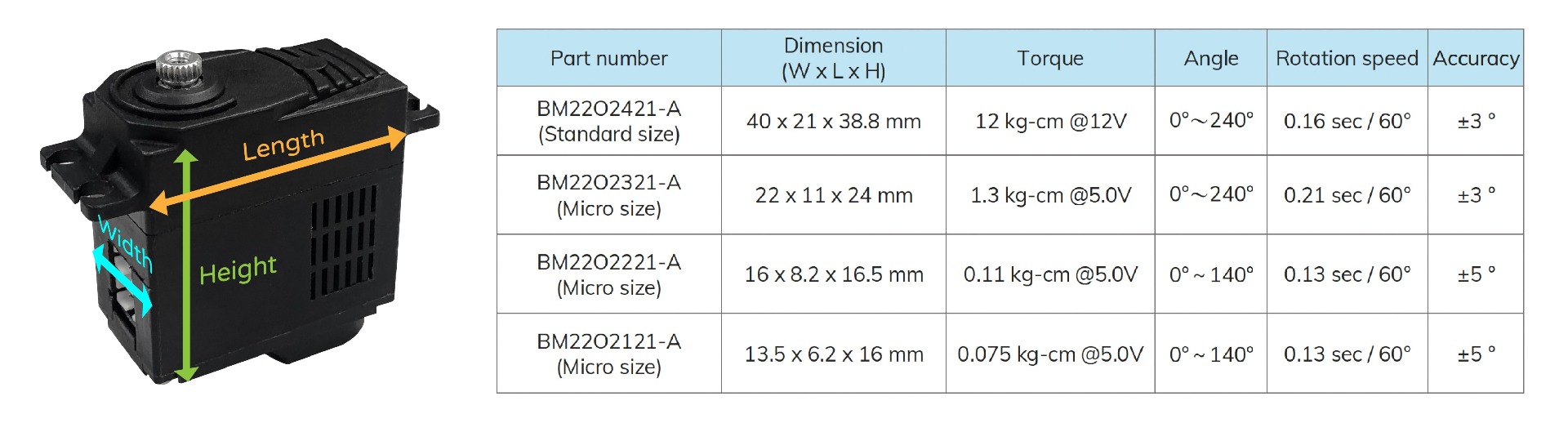
Dimension: 13.5 x 6.2 x 16 mm
Net weight: 2g
Packing List: BM22O2121-A x 1 / Expansion board x 1 /
Screw x 3 / Single arm horn x 1 / Double arm horn x 1 / Four Point horn x 1
The servos have different sizes, and the rotation speed, angle, torque and accuracy of them are also different.
PRODUCT FEATURES
Operating Voltage: 5.0V - 7.2V
Operating Current
- 3.4mA @ 5.0V (Typ., no load)
- 0.7A @ 5.0V (Typ., stall)
Standby Current: 0.6mA~1.0mA @ 5.0V (sleep mode)
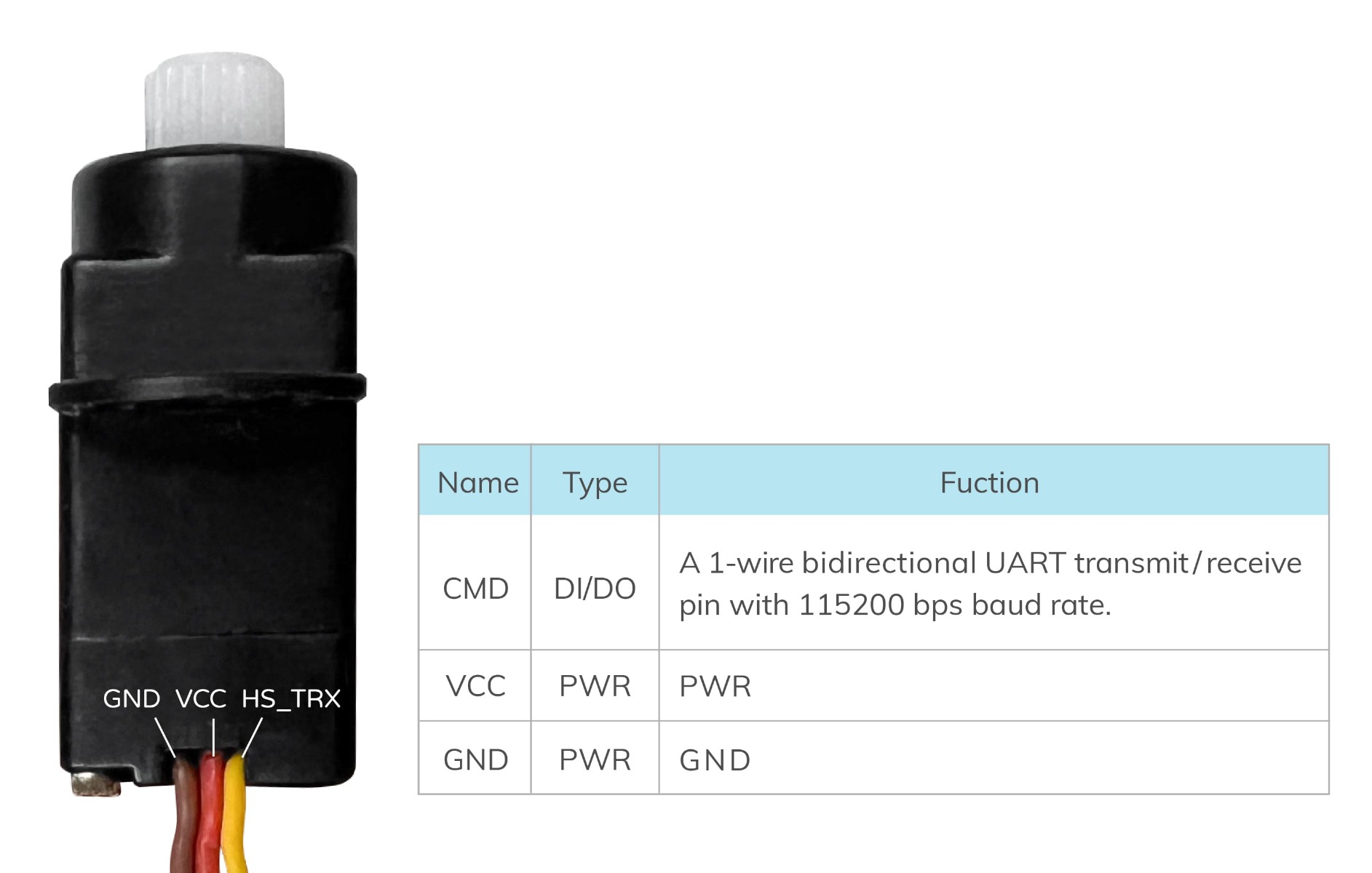
Communication interface: 1-wire bidirectional UART interface
Plastic Gear
Protection functions: stall and low-voltage
Angle control mode: controlled range 0°~140°, rotation time is adjustable
CONNECTION
Differences between PWM and UART servos
The PWM servo
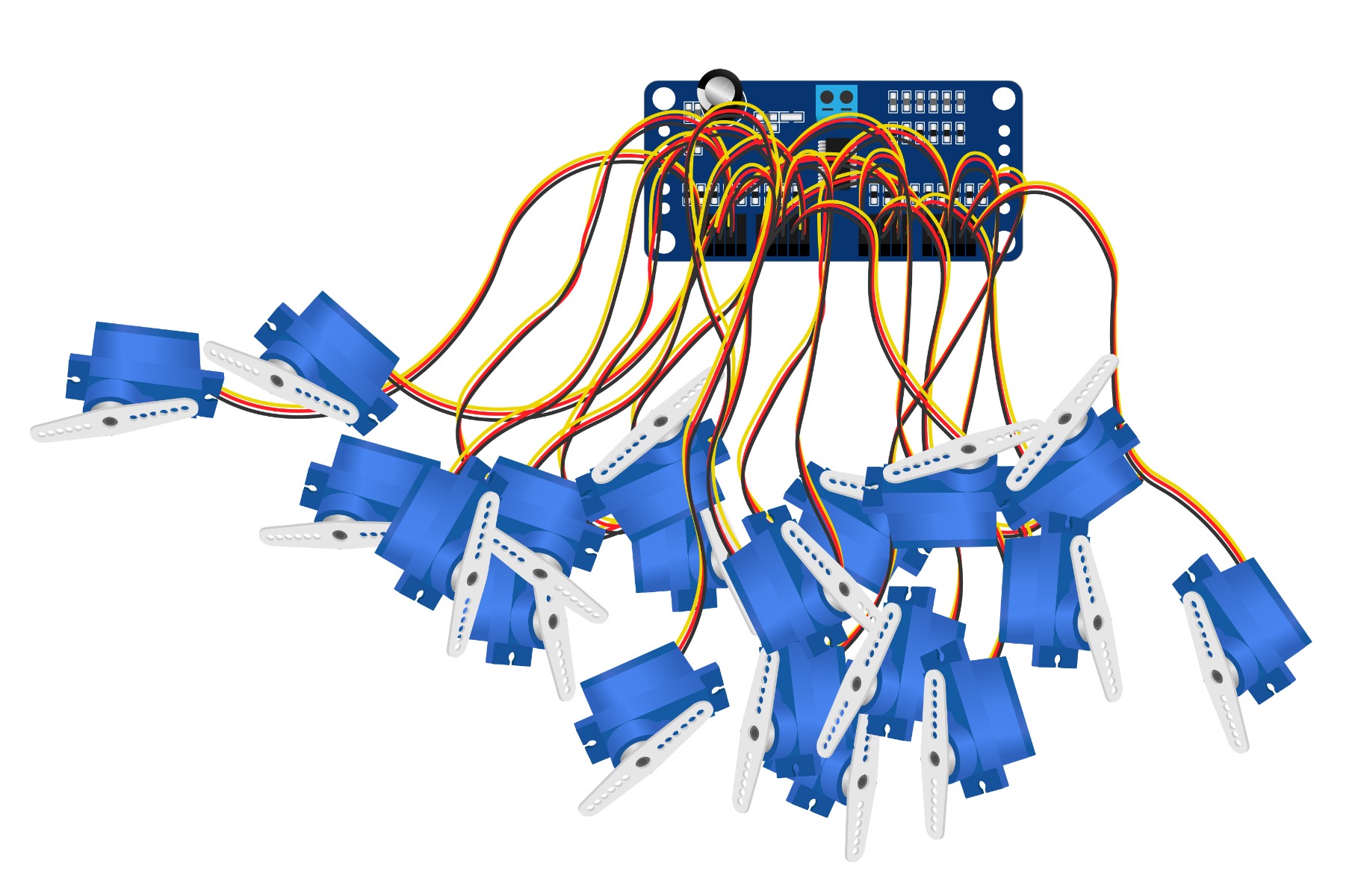
Users can control the servo's angle through a fixed PWM cycle, but its performance of accuracy is not as good as UART servo. For robot control, one PWM output port only can be connected to one PWM servo.
To connect multiple servos, it necessary to use a control board to connect with servos, and the wires are in a mess.
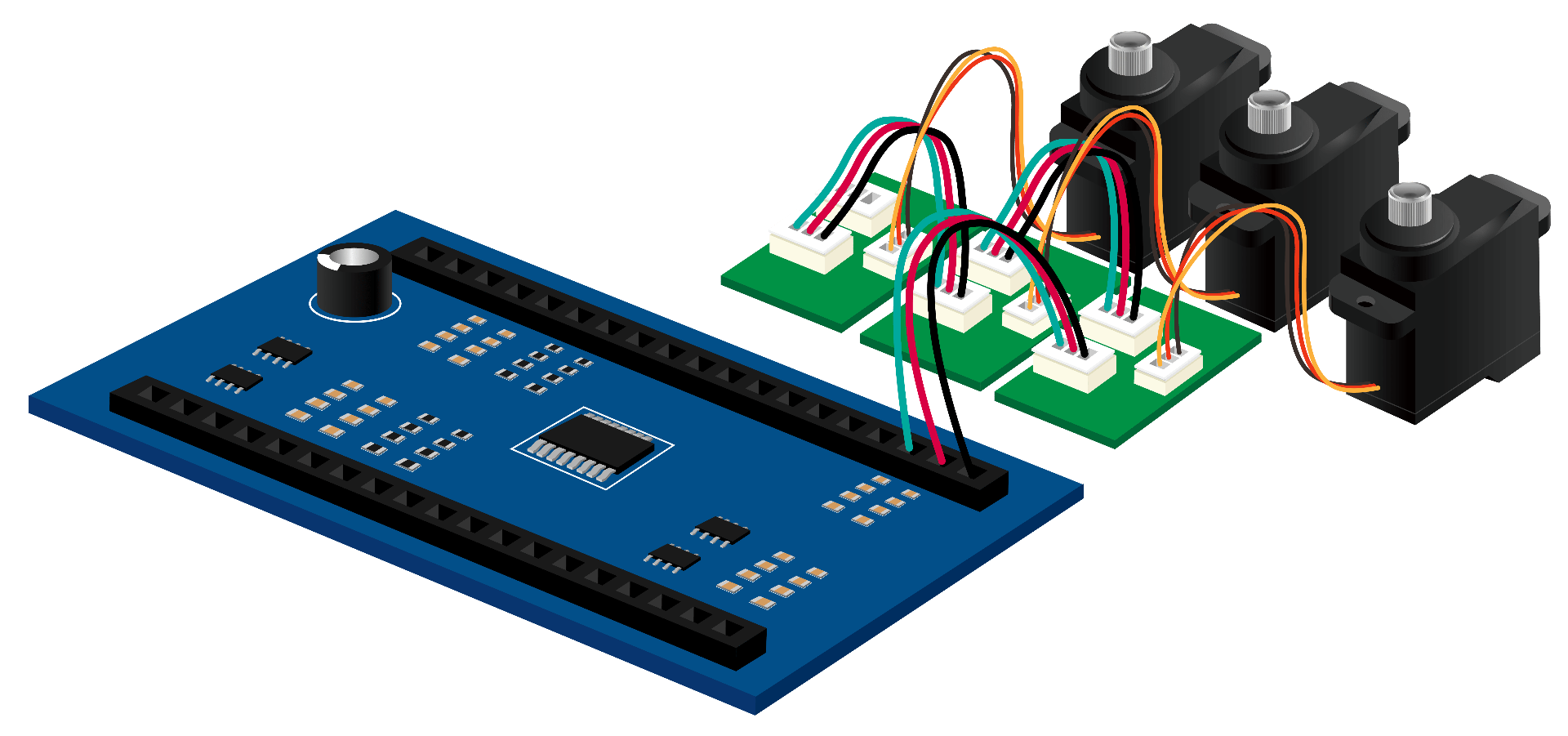
The UART servo
The servo's angle can be controlled by UART command, and it has high performance of accuracy. Besides, it also provides speed control. It communicates with control board through 1-wire bidirectional UART interface, and users can connect multiple servos in series.
The firmware and parameters can be updated by UART and IAP.